Section 9.2 is entitled “Planar Systems.”
I’ve been on a week-long hiatus and I decided that waiting
around wasn’t going to fix the fact that this section has pages and pages and
pages of notes. Now I realize that these pages are mostly examples. But, for
the most part, I’m going to be throwing a lot of quotes around concerning
theorems and propositions. Unfortunately, it’s one of those sections.
Planar systems are just linear systems in the 2nd dimension.
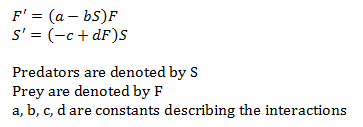
We would like to know how to solve the following systems:

So recall back to the last section, where
we discussed eigenvalues λ and eigenvectors v with the solution y(t)
= eλtv. We know that eigenvalues are
solutions of the determinant of of A – λI set equal to zero. Let’s expand that
out:

This
is a quadratic answer, called the characteristic polynomial. Something to note
is that the constant term is the determinant of A (without the eigenvalue). For
sake of space, we’ll denote this as D (it probably stands for determinant).
Then there’s the coefficient of λ, which we’ll denote as T. If you’re in linear
algebra, you’ll notice this is the trace of A (or, in other words, the sum of
the diagonal entries of A). The trace of A can also be denoted as tr(A). This
means we can rewrite our equation of this planar system as

There
are three cases we must consider about this characteristic polynomial:
1.
Real roots (when T2 – 4D > 0)
2.
Complex roots (when T2 – 4D < 0)
3.
A real root of “multiplicity 2” (when T2 – 4D = 0)
Here’s
a proposition for you:
“Suppose
λ1 and λ2 are eigenvalues of an n × n matrix A. Suppose v1 ≠ 0 is an eigenvector for λ1 and v2 ≠ 0 is an
eigenvector for λ2. If λ1 ≠ λ2, then v1 and v2 are linearly independent” (379).
Something
really nice to note from this is that if v1
and v2 are linearly
independent, then
I
wanted to actually write that, but there’s only so much that can be done
without the equation editor.
Something
nice to note about both of these linearly independent conclusions is that the
eigenvalues and eigenvectors don’t have to be real for these propositions to be
true. If one or more is complex, then the results are still true. Hooray!
Here’s
a theorem for you:
“Suppose
that A is a 2 × 2 matrix with real eigenvalues λ1 ≠ λ2.
Suppose that v1 and v2 are eigenvectors
associated with the eigenvalues. Then the general solution to the system y’ = Ay is
where
C1 and C2 are arbitrary constants” (380).
In
the case of complex eigenvalues, T2 – 4D < 0, which would make
the square root full of negative-ness, which was a big no-no taught to us on
the first day of square roots. However, we can package that negative-ness with
the lovely letter i, so our complex roots
can look like

This
means we’ll have a complex matrix, which I’ll just leave some websites here if
you need a refresher on the subject:
Here’s
a theorem followed by a proposition for you regarding the topic of complex
conjugate eigenvalues:
NOTE:
You may or may not wonder why I changed one of the eigenvalues from what the
book had originally. This is because the book used an overlined λ (also said as
“λ bar”) and this will not show up on the website. So I changed it to a strikethrough,
which is basically an overline, but moved down a little bit.
“Suppose
that A is a 2 × 2 matrix with complex conjugate eigenvalues λ and [λ].
Suppose that w is an eigenvector
associated with λ. Then the general solution to the system y’ = Ay is

where
C1 and C2 are arbitrary constants” (383).
And
the proposition:
“Suppose
A is an n × n matrix with real coefficients, and suppose that z(t) = x(t) + iy(t) is a solution to the system z’ = Az.
(a)
The complex conjugate [z] = x
– iy is also a solution to [this system].
(b)
The real and imaginary parts x and y are also solutions to [this system].
Furthermore, if z and [z] are linearly independent, so
are x and y” (383).
So
when we have a complex eigenvalue, it will be of the form λ = α + iβ, and its associated eigenvector will
be of the form w = v1 + iv2. When we
have a 2 × 2 matrix A, the solution of the system y’ = Ay will be of the
form

where
C1 and C2 are arbitrary constants” (384).
So
now we’re left with the final case for our eigenvalues – the multiplicity 2 one
(which is literally called “the easy case” in the book). If this multiplicity
nonsense is the case, our characteristic polynomial will be
In
this case, λ1 is T/2 and it has multiplicity 2. This was about the
time when I finally realized that multiplicity means something and I don’t
think we ever went over it so here’s a thing for you to understand it (like I
now do):
From
this there are two subcases, depending on the dimension of the eigenspace of λ.
Since the eigenspace is a subspace of R2,
the dimension can only be 1 or 2.
If
the dimension is 2, then the eigenspace must be equal to all of R2. This means every vector
is an eigenvector, so Av = λ1v for all v in R2. For
example, if we had

Here’s
a theorem concerning the other subcase, where the eigenvalue has λ of multiplicity
2 and eigenspace of dimension 1.
“Suppose
that A is a 2 × 2 matrix with one eigenvalue λ of multiplicity 2, and suppose
that the eigenspace of λ has dimension 1. Let v1 be a nonzero eigenvector, and choose v2 such that (A – λI)v2 = v1. Then

form
a fundamental set of solutions to the system x’ = Ax” (388).
This
means the general solution can be written as

Finally, here's one more website concerning this material that I didn't quite know where to put in this summary:
All
right, that’s it for section 9.2! It wasn’t as bad as I thought it was going to
be.
I’ve
been ill for the past couple of days, so I’m really foggy right now. I feel
pretty good about all this, but if something is blatantly wrong and I don’t
pick up on it for a while, then I’m really sorry about that.
I’ll
see you when I see you.